
The main objectives are:
The developed platform will be demonstrated and evaluated for specific scenarios that include special use cases, i.e. tunnels and platooning.
General Information:
IMST is an SME with a competence center and professional development house for high frequency circuits, wireless modules, and communications systems. IMST provides individualized support to any customer during every phase of product development, from initial consulting to series production.
|
|
Engineering the Future - since 1758: Focused on key technologies transport and energy the MAN Group (MAN SE) offers innovative products such as trucks, busses, diesel engines, turbomachinery, special gear units and complete power plant solutions. The MAN Group - with its clear distribution of roles, centralizes strategic management activities and strengthens the operational responsibilities of the three subgroups, MAN Truck & Bus, MAN Diesel & Turbo and MAN Latin America - is one of Europe’s leading commercial vehicle, engine and mechanical engineering companies. MAN can look back on a corporate history of more than 250 years.
|
|
TNO is the Netherlands Organization for Applied Scientific Research and was founded in 1932. TNO is a knowledge organisation for companies, governmental bodies and public organisations. Some 4,500 employees create, develop, and apply scientific knowledge in various domains ranging from industry to society aspects. It is the fundamental goal of TNO to direct its research activities toward creative and practical innovations in the form of new products, services, and processes, fully customized for businesses and governmental institutions. TNO works on seven research themes. One of these themes is “Mobility”, comprising topics as (intelligent) vehicle technology, ITS, cooperative and automated driving, road side technology, infrastructure technology, intelligent traffic management, environment and human factors in transport.
|
|
The University of Piraeus is a prestigious institution in the area of Digital Systems, Technology and Finance. The Department of Digital Systems is the main driver and contributor to making the University of Piraeus Research Center (UPRC) one of the fastest growing institutions in Greece in the national and international research arenas. Specifically, the department covers important areas of the widely and rapidly developing field of Digital Science and Technology. The department’s curricula and research cover the areas of broadband (wireless and optical) networks, digital/network services, as well as the techno-economical management and security of digital systems. In addition, the department consists of over twenty-five (25) faculty members and is very active, both internationally and nationally, in all the aforementioned areas.
|
|
|
|
|
©2017 IET. This paper is a postprint of a paper submitted to and accepted for publication in Electronics Letters and is subject to Institution of Engineering and Technology Copyright. The copy of record is available at IET Digital Library.
©2016 IEEE. Personal use of this material is permitted. Permission from IEEE must be obtained for all other uses, in any current or future media, including reprinting/republishing this material for advertising or promotional purposes, creating new collective works, for resale or redistribution to servers or lists, or reuse of any copyrighted component of this work in other works.
P. S. Bithas, A. G. Kanatas and D. W. Matolak, "Exploiting Shadowing Stationarity for Antenna Selection in V2V Communications," in IEEE Transactions on Vehicular Technology, vol. 68, no. 2, pp. 1607-1615, Feb. 2019, doi: 10.1109/TVT.2018.2888802
|
|
|
|
P. S. Bithas, A. G. Kanatas, D. B. da Costa, P. K. Upadhyay and U. S. Dias, "On the Double-Generalized Gamma Statistics and Their Application to the Performance Analysis of V2V Communications," in IEEE Transactions on Communications, vol. 66, no. 1, pp. 448-460, Jan. 2018, doi: 10.1109/TCOMM.2017.2757466
|
|
|
|
P. S. Bithas, G. P. Efthymoglou and A. G. Kanatas, "V2V Cooperative Relaying Communications Under Interference and Outdated CSI," in IEEE Transactions on Vehicular Technology, vol. 67, no. 4, pp. 3466-3480, April 2018, doi: 10.1109/TVT.2017.2786583
|
|
|
|
G. P. Efthymoglou, P. S. Bithas, and A. G. Kanatas, "Exact SNR and SIR analysis in Poisson wireless networks," in Electronics Letters, vol. 53, no. 5, pp. 356–358, Mar. 2017, doi: 10.1049/el.2016.2378
|
|
|
|
K. P. Peppas, P. S. Bithas, G. P. Efthymoglou and A. G. Kanatas, "Space Shift Keying Transmission for Intervehicular Communications," in IEEE Transactions on Intelligent Transportation Systems, vol. 17, no. 12, pp. 3635-3640, Dec. 2016, doi: 10.1109/TITS.2016.2556082
|
|
|
|
P. S. Bithas, K. Maliatsos and A. G. Kanatas, "The Bivariate Double Rayleigh Distribution for Multichannel Time-Varying Systems," in IEEE Wireless Communications Letters, vol. 5, no. 5, pp. 524-527, Oct. 2016, doi: 10.1109/LWC.2016.2598735
|
|
|
|
P. S. Bithas, A. G. Kanatas and D. W. Matolak, "Shadowing-Based Antenna Selection for V2V Communications," in 2018 IEEE 29th Annual International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 2018, doi: 10.1109/PIMRC.2018.8581007
|
|
|
|
P. S. Bithas, A. G. Kanatas, D. B. d. Costa and P. K. Upadhyay, "A Low Complexity Communication Technique for Mobile-to-Mobile Communication Systems," in 2018 14th International Wireless Communications & Mobile Computing Conference (IWCMC), Limassol, Cyprus, 2018, doi: 10.1109/IWCMC.2018.8450274
|
|
|
|
P. S. Bithas, A. G. Kanatas, D. B. da Costa, P. K. Upadhyay and U. S. Dias, "The Double-Generalized Gamma Distribution and Its Application to V2V Communications," in GLOBECOM 2017 - 2017 IEEE Global Communications Conference, Singapore, 2017, doi: 10.1109/GLOCOM.2017.8254455
|
|
|
|
P. S. Bithas, A. G. Kanatas, D. B. da Costa and P. K. Upadhyay, "Transmit antenna selection in vehicle-to-vehicle time-varying fading channels," in 2017 IEEE International Conference on Communications (ICC), Paris, France, 2017, doi: 10.1109/ICC.2017.7997379
|
|
|
|
L. Marantis, K. Maliatsos, C. Oikonomopoulos-Zachos, D. K. Rongas, A. Paraskevopoulos, A. Aspreas, A. G. Kanatas, "The pattern selection capability of a printed ESPAR antenna," in 2017 11th European Conference on Antennas and Propagation (EUCAP), Paris, France, 2017, doi: 10.23919/EuCAP.2017.7928841
|
|
|
|
L. Marantis, A. Paraskevopoulos, D. Rongas, A. Kanatas, C. Oikonomopoulos-Zachos and S. Voell, "A printed monopole ESPAR antenna for Truck-to-Truck communications," in 2017 International Workshop on Antenna Technology: Small Antennas, Innovative Structures, and Applications (iWAT), Athens, Greece, 2017, doi: 10.1109/IWAT.2017.7915368
|
|
|
|
K. P. Peppas, P. S. Bithas, G. P. Efthymoglou and A. G. Kanatas, "Spatial Modulation for V2V and V2I Communications in a Multiple Scattering Environment," in 2016 IEEE Global Communications Conference (GLOBECOM), Washington, DC, USA, 2016, doi: 10.1109/GLOCOM.2016.7842283
|
|
|
|
P. S. Bithas, A. Aspreas and A. G. Kanatas, "A new reconfigurable antenna scheme and its application to vehicle-to-vehicle communications," in 2016 IEEE 12th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), New York, NY, USA, 2016, doi: 10.1109/WiMOB.2016.7763218
|
|
|
|
P. S. Bithas, G. P. Efthymoglou and A. G. Kanatas, "A cooperative relay selection scheme in V2V communications under interference and outdated CSI," in 2016 IEEE 27th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Valencia, Spain, 2016, doi: 10.1109/PIMRC.2016.7794741
|
|
|
|
E. T. Michailidis, K. Maliatsos and A. G. Kanatas, "MIMO V2V Communications Via Multiple Relays: Relay Selection Over Space-Time Correlated Channels," in 2016 European Conference on Networks and Communications (EuCNC), Athens, Greece, 2016, doi: 10.1109/ICC.2016.7511540
|
|
|
P. S. Bithas, G. P. Efthymoglou and A. G. Kanatas, "Intervehicular communication systems under co-channel interference and outdated channel estimates," in 2016 IEEE International Conference on Communications (ICC), Kuala Lumpur, Malaysia, 2016, doi: 10.1109/ICC.2016.7511540
|
|
|
|
P. S. Bithas, K. Maliatsos and A. G. Kanatas, "V2V Communication Systems under Correlated Double-Rayleigh Fading Channels," in 2016 IEEE 83rd Vehicular Technology Conference (VTC Spring), Nanjing, China, 2016, doi: 10.1109/VTCSpring.2016.7504525
|
|
|
|
E. T. Michailidis, K. Maliatsos and A. G. Kanatas, "Relay selection in V2V communications based on 3-D geometrical Channel modeling," in 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 2016, doi: 10.1109/EuCAP.2016.7481945
|
|
|
|
L. Marantis, K. Maliatsos and A. Kanatas, "ESPAR antenna positioning for Truck-to-Truck communication links," in 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 2016, doi: 10.1109/EuCAP.2016.7481842
|
|
|
|
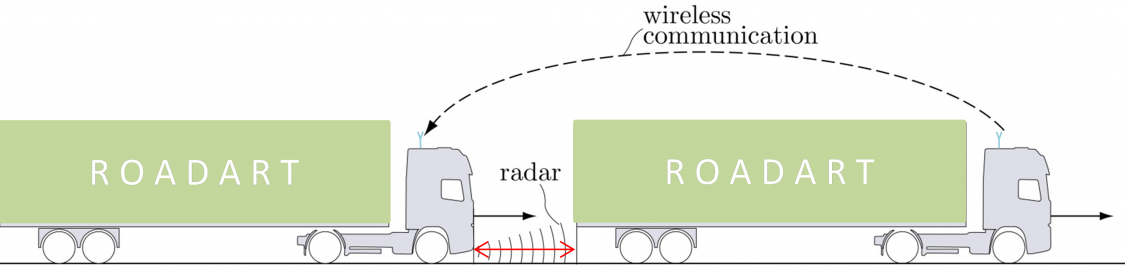
The ROADART project aimed for the development of a reliable, automated system for truck-to-truck (T2T) or truck-to-infrastructure (T2I) communication is safety, since a reliable T2T/T2I communication platform can be used to warn professional drivers for immediate dangers and to provide crucial information for upcoming road conditions. In addition efficient and safe automated platooning systems drastically cut down GreenHouse Gas (GHG) and other pollutant emissions, while simultaneously they reduce the required transportation costs through fuel savings.
The most important and complicated objective of the project was the demonstration of the ROADART platform. In this platform, all the designed diversity techniques, ESPAR antenna concepts and the implemented hardware and software components were integrated on two MAN test trucks in order to demonstrate the performance improvements induced by the ROADART approach.
|
|
|
|
The novelties incorporated in the ROADART platform cover many areas. First of all is the pattern diversity concept, which was made feasible by implementing special reconfigurable antennas, the so called electronically switched parasitic radiator (ESPAR) antennas. Thus the system is adapted dynamically to its environment. The smart RF section cooperates with smart digital algorithms that run on software defined radios to select the best pattern combination and provide an efficient and reliable solution. Finaly a novel localization algorithm that is based on the input from the truck sensors offers high localization accuracy in environments where there is no navigation system available
|
|
|
|
The novelties incorporated in the ROADART platform cover many areas. First of all is the pattern diversity concept, which was made feasible by implementing special reconfigurable antennas, the so called electronically switched parasitic radiator (ESPAR) antennas. Thus the system is adapted dynamically to its environment. The smart RF section cooperates with smart digital algorithms that run on software defined radios to select the best pattern combination and provide an efficient and reliable solution. Finaly a novel localization algorithm that is based on the input from the truck sensors offers high localization accuracy in environments where there is no navigation system available
|
|
|
|
In ROADART, a novel Diversity Engine tailored-made for Truck-to-Truck (T2T) and Truck-to-Infrastructure (T2I) Communications was developed. The antenna (or spatial) diversity was used as the base of the diversity engine and additionally, a beampattern selection scheme was implemented with the use of reconfigurable antennas. The beampattern selection scheme was able to produce an omnidirectional pattern for broadcast - multicast transmission/reception as well as a directive pattern that can improve performance for several applications like CACC and platooning. The hybrid spatial-beamspace diversity scheme was implemented with the use of ESPAR Antennas with pattern selection capabilities.
|
|
|
|
An important and complicated objective of the project was the implementation of the Diversity Engine and especially the Dynamic Reconfiguration of the antennas for the ROADART platform in order to track the radio channel fluctuations in the complex T2T communications environment. Three dynamic reconfiguration modes were developed with full reconfiguration in all antennas and with omni support from one RF chain per mirror. The engine monitors continuously the SNR and reconfigures the patterns when it reduces below a threshold while reconfiguration is performed in two stages in order to ensure compatibility with the radio standard.
|
|
|
|
In ROADART, one of the developed and demonstrated diversity operation modes is the Geo-tracking, Geo-networking scheme. According to that, the patterns are selected based on the geometry of vehicles in a given time instance. This information is achieved through the ROADART localization engine, where each vehicle is aware of its position and additionally through the received ITS messages, which reveals the position of the cooperating vehicles. The engine calculates the relative heading angle between the vehicles and each vehicle decides on the combination of patterns that best fits the geometry of the vehicle. In this video, the behavior of the algorithm during an overtake maneuver that took place in the A55 Highway in Germany is presented.
|
|
|
|
A novel localization technique was developed in ROADART attempting to improve positioning performance in challenging conditions like tunnels. The Localization Engine, which is based on an Extended Kalman Filter, is able to operate with variable sampling rates of incoming data from various heterogeneous sources such as the GPS, Truck Sensors as well as positioning information from cooperating vehicles through ITS services. Then, the localization result is distributed to all interested parties with the use of the Data Distribution Service (DDS) protocol. The ROADART engine operated with less than 2m accumulated error for a 2km in-tunnel course during demonstration.
|
|
|
|
The focus of the time- and safety-critical Cooperative Adaptive Cruise Control (CACC) is to obtain robustness on the application layer against any wireless communication impairments, in particular packet losses and (time-varying) latency, utilizing ROADART communication system characteristics. The development of a model predictive controller (MPC) involves a prediction horizon, which may be used to predict the future output behavior of the leading vehicle. Thus CACC continues its functionality, increases the availability and robustness of the system by sharing look-ahead information and potentially enables shorter inter-vehicle following distances.
|
|
|
|
Join us at the workshop on “Real time ITS services towards a safer and more efficient road transport”.
Place of the workshop: TRA conference venue, room Galerie 5+6.
Date: 17/04/2018, from 9:00 to 12:30
You can find us also at the MAN booth in the mall, at level 0, in front of the press lounge / TRA Visions room / stolz rooms.
This is also the entrance/exit of the Outdoor Area A, where a MAN eTruck prototype will be also exhibited.
|
|
|
|
ROADART is attending EuCAP 2018 in London from 8-13 April 2018 and organize the session SW02 on "Multi-antenna concepts and communication techniques in C-ITS systems: From Theory to Application".
Our List of invited speakers and the topics that will address:
|
|
|
|
The ROADART T2X channel modeling task was based on wideband multidimensional channel measurements at 5.9 GHz ITS frequency band. Three channel measurement campaigns were undertaken; two in Germany and one in Greece.
The third measurement campaign took place in Panagopoula tunnel, a 3.179 meters long tunnel located in Peloponnese-Greece. The setup of the measurement equipment was designed in a way that one can measure a more generic channel that is free of shadowing in T2I links. The channel sounder used could measure a 2×4 MIMO channel with a signal bandwidth of 25 MHz. The excitation signal was an OFDM-like transmitting signal with the subcarriers uniformly distributed in the measurement bandwidth and it was generated using Frank-Zadoff-Chu sequences. The signal was cyclically extended. The technique that was used for the MIMO measurement procedure is a popular fast switching method with a time division basic principle scheme that alternates between the transmitting antennas for each one of the receiving antennas.
|
|
|
|
The second measurement campaign took place in Kamp-Lintfort, in North Rhine-Westphalia. The measurement equipment setup was designed in order to measure a more generic channel that is free of shadowing in T2T and T2I links. Therefore, to avoid the signal blocking by the vehicle structures, the antennas were placed well-above the roof of two vehicles, at a height similar to the one used in the first measurement campaign, using car roof racks and machined custom-made equipment. The channel sounder used could measure a 2×4 MIMO channel with a signal bandwidth of 500 MHz. Due to the unavailability of two baseband generators, a different set of excitation waveforms were used. The measurement routes that were followed included mainly a highway with varying traffic density along its route, two fairly long tunnels and some areas with smaller roads.
|
|
|
|
The first campaign took place in the outskirts of Munich, in the district of Dachau, Bavaria. The measurement setup and the placement of the antenna array on the trucks considered the impact of the truck container and the corresponding shadowing of the signal. The channel sounder used could measure a 2×8 MIMO channel with a signal bandwidth of 500 MHz. The excitation signal is an OFDM-like transmitting signal with the subcarriers uniformly distributed in the measurement bandwidth and it is generated using Frank-Zadoff-Chu sequences. The signal is cyclically extended. The technique that was used for the MIMO measurement procedure is a popular fast switching method with a time division basic principle scheme that alternates between the transmitting antennas for each one of the tetrad of the receiving antennas. After the reception of ten frames from the first tetrad, RF switch was taking place, and another ten frames were received from the second tetrad. The overall sequence contains 7000 samples with a sampling frequency of 7 GSamples/sec. The routes followed included mainly a highway with varying traffic density along its path, a fairly long tunnel, and some areas with smaller roads that were used for maneuvering the trucks in order to get back to the highway.
|
|
|
|
[D1.1 - Internal Website and Collaborative Tool]
|
Dissemination Level: Public |
|
[D1.2 - Risk and Quality Procedures Manual]
|
Dissemination Level: Public |
|
[D2.1 - Connected Vehicle Use Cases and High Level Requirements]
|
Dissemination Level: Public |
|
[D2.2 - Attack Modelling]
|
Dissemination Level: Public |
|
[D2.3 - Vulnerability Analysis]
|
Dissemination Level: Public |
|
[D2.4 - Security Controls and Protection Profiles]
|
Dissemination Level: Public |
|
[D3.1 - Analysis of Existing Assurance Methodologies and Tools]
|
Dissemination Level: Public |
|
[D3.2 - Quantification of Trustworthiness Attributes and Definition of Assurance Levels of Connected Vehicle]
|
Dissemination Level: Public |
|
[D3.3 - Results of SAFERtec Assurance Framework Testing]
|
Dissemination Level: Confidential |
|
[D4.1 - Specifications of Connected Vehicle System]
|
Dissemination Level: Public |
|
[D4.2 - Modules and Applications of Connected Vehicle]
|
Dissemination Level: Confidential |
|
[D4.3 - Integration of Connected Vehicle System]
|
Dissemination Level: Confidential |
|
[D5.1 - Comparative Analysis of Assurance Frameworks]
|
Dissemination Level: Public |
|
[D5.2 - Simulation Based Evaluation of SAFERtec Assurance Framework]
|
Dissemination Level: Public |
|
[D5.3 - Extended Modules of the Connected Vehicle System]
|
Dissemination Level: Public |
|
[D5.4 - Composite Evaluation of SAFERtec Assurance Framework]
|
Dissemination Level: Public |
|
[D6.1 - Reference Architecture of the Assurance Framework Toolkit]
|
Dissemination Level: Public |
|
[D6.2 - Implementation of Assurance Framework Toolkit]
|
Dissemination Level: Public |
|
[D6.3 - Assurance Framework Toolkit Prototype]
|
Dissemination Level: Public |
|
|
[D7.1 - SAFERtec Dissemination and Exploitation Plan]
|
Dissemination Level: Public |
|
[D7.2 - SAFERtec Website]
|
Dissemination Level: Public |
|
[D7.3 - Roadmap Automotive Assurance Frameworks – Beyond V2I]
|
Dissemination Level: Public |
|
[D7.4 - SAFERtec Standardization Plan]
|
Dissemination Level: Public |
|
[D7.5 - Contribution, Extensions and/or Recommendation to Standard]
|
Dissemination Level: Public |
|
The ROADART Geometric Stochastic Framework is available for everybody in the following git repository:
https://github.com/maliatsos/roadart_channel_model
This repository contains a current implementation of the Geometric Stochastic Vehicle-to-Vehicle and Truck-to-Truck channel model that was extracted in the context of the Horizon 2020 ROADART project (WP2).
The repository is dynamic and it will continue to update after the conclusion of the project. Long term support is provided by University of Piraeus Research Center (UPRC).
Users should investigate as tutorials roadart_simulator.m and main.m in order to understand the rationale behind the ROADART channel model and as a tutorial on the use of the functional procedures and classes.
Access to measurements is provided through ftp connection (check raw_data.txt in the git)
We strongly encourage researchers to create their own git branches and use, test and evaluate the ROADART channels.
For information, questions, contributions and bugs please contact UPRC - we will be happy to assist you or cooperate.
Contact Person: Konstantinos Maliatsos : kmaliat@unipi.gr or maliatsos@mobile.ntua.gr

This project has received funding from the European Union’s Horizon 2020 research and innovation programme under grant agreement No. 636565.